格安3D LiDAR Unitree 4D L1を購入
Unitree社というと、犬型ロボットが有名ですね。
ボストンダイナミクスのspotに比べかなり安いことから一時期話題になっていました。
この度、Unitree 社が最近発売L1という4D LiDARを購入したので、試しに使用してみました。
もともとはLivox MID-360を購入予定だったのですが、丁度在庫切れだったため、こちらを購入しました。
4Dってなんやねんってことですが、どうやら反射強度も含めて4Dとしているようです。
電源投入
電源は12Vです。
通信方式はシリアルです。ただsdkを見る感じUDPにも対応してそうだったのでいずれイーサケーブル版が発売されるかもしれません。
電源いれるといきなり回り出します。
周りに物がない状態で動かすことをお勧めします。
上の回る部分の重量が均等ではないので結構あらぶります。
付属のACアダプタが12V1Aなのですが、こいつが意外と貧弱で、LiDARが時々停止してしまいます。
なのでロボットに搭載して12Vラインから直接引っ張ってきたら安定稼働するようになりました。
ソフトウェアおよび起動
https://m.unitree.com/download/LiDAR
↑ここから、sdkとかslamパッケージとかbagファイルとか3dモデルがダウンロードできます。
Macbookにparallelsでいれたubuntu20で動かしてたのですが、やけにフリーズします。
UbuntuがネイティブインストールされたPCで試したら問題なくうごいたので、相性が悪いのかもしれません。
ロボットに乗っける
FAST_LIOを使ってみる
FAST_LIOはあんまり詳しくないですが香港大学で作られたLOAM(LiDAR Odometry and Mapping)らしいです。
https://github.com/hku-mars/FAST_LIO
標準でVelodyneとかLivoxのconfigファイルが用意されているのですが、UnitreeL1はありません。
ただUnitree社の公式サイトからダウンロードすると、UnitreeL1のconfigファイルも追加されたパッケージがダウンロードできます。
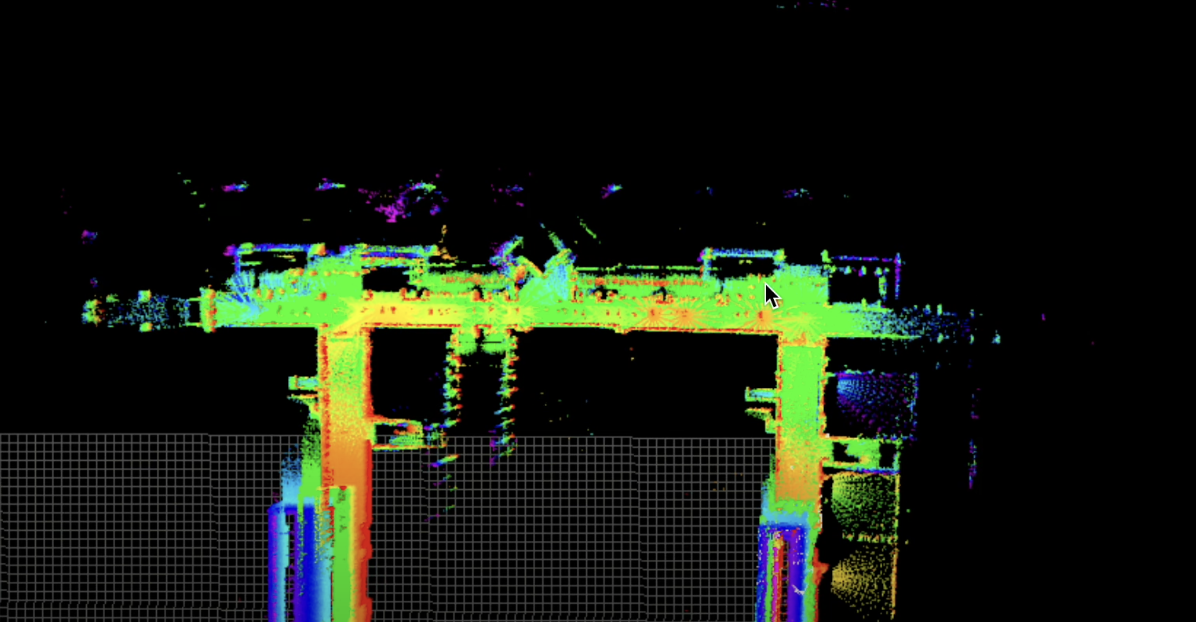
ビルドして岩手県立大学内で動かしてみました。
PCスペックは高くないですが意外とうごきました。
※RAM8GでCPUがRyzen 5560U
若干歪みます。
IMUも内臓でついてるのにZ軸方向も段々と上向きに歪んできます。
ただ200~300mほど動かしてこの程度なら精度が良い気もします。
ちなみにFAST_LIOはループクロージャがないので、Loopクロージャ付きのものも今度試してみようと思います。