
MavrosでROSからArdupilotを接続する
geometry_msgs/Twist型トピックでシリアル経由でPixhawkに送って、操作指示が出せるらしい。
またROSで取得した自己位置推定のTFとかをArduPilotに送って建物内でもpixhawkで自動走行するなども可能らしい。
Ardupilotをguidedモードに入れるには、グルーバルポジションが必要なのでGPSがない場合はごまかす必要あるみたい。
rosとardupilotを繋ぐとGCSから操作するのめんどくさくなるんじゃと思ったがmavros自体にmavlink-routerの様な、updに変換してGCSに送る機能もついてるみたいなので、mission plannerから色々操作もできる。
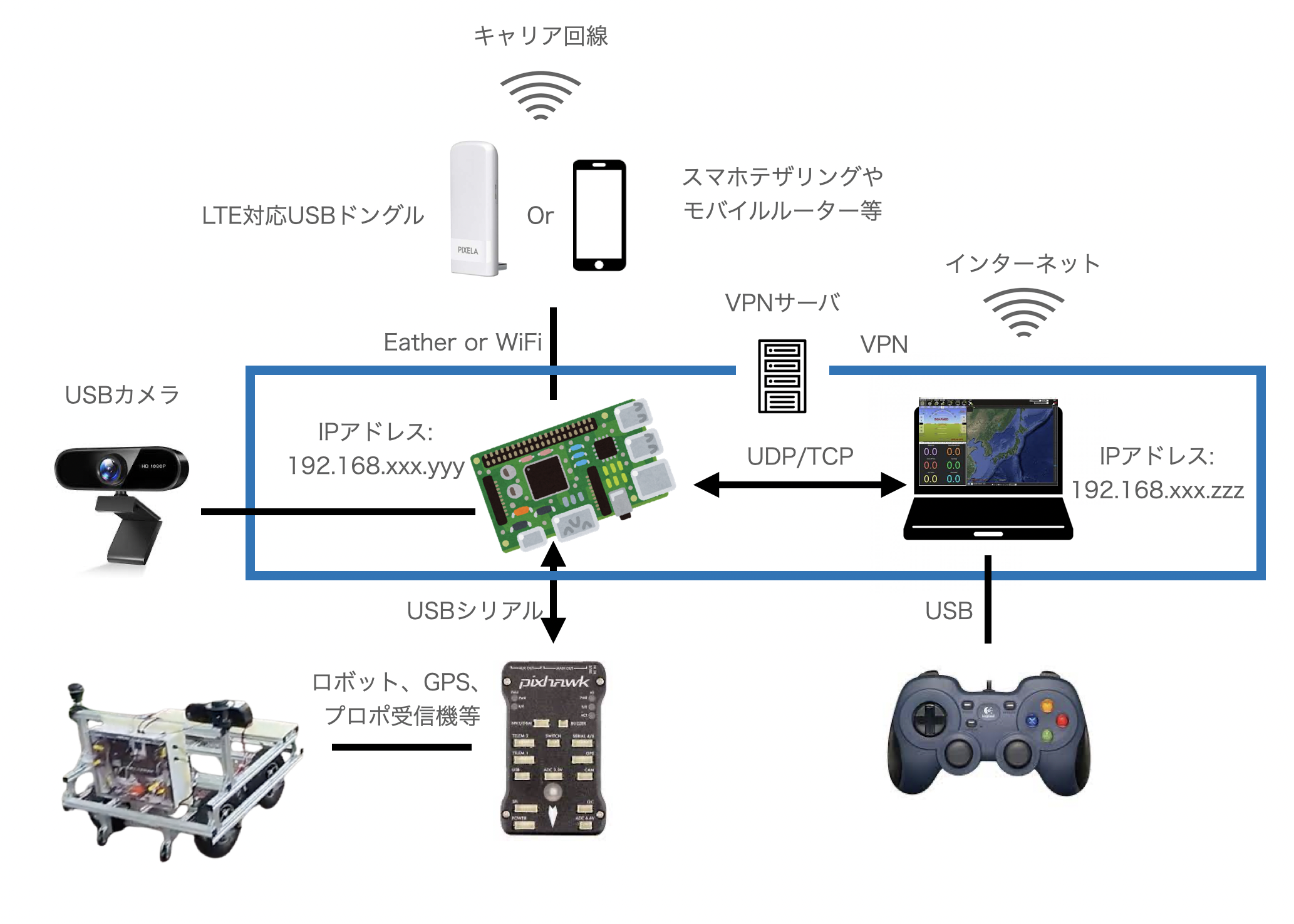
構成例

事前セットアップ
使うもの
- Pixhawk 2.4.8
- USBケーブル
- Ubuntuの入ったPC(今回はMacにParallels+ubuntu20)
Pixhawk側のセットアップ
- PixHawkのファームウェアをroverにしておく
- preArmの条件やフェイルセーフを全て解除しておく
- 動作確認のためにモーターを動かせるようにしておくと便利
ROS側の事前セットアップ
- rosをインストールしておく
- rosについてある程度理解しておく
- 今回はnoeticを使用
mavrosのインストール
下記コマンドで必要パッケージをインストール
melodicを使用している場合はnoeticの部分をmelodicに書き換える
sudo apt install ros-noetic-mavros
sudo apt install ros-noetic-mavros-extrasパッケージの作成とビルド
この辺は丸々、この記事を参考にさせていただきました。https://qiita.com/srs/items/09d217c8b9f9e21d2f1d
細かいところで変更を加えています。
下記変更点
- パッケージ名をmavros_testとした
- c++ファイル名はmavros_bridge.cppとした
必要なライブラリstd_msgs rospy roscpp mavros_msgs geographic_msgs sensor_msgs geometry_msgs - configファイルの最終行に下記を追加した
こうすることでArdupilotに送られるmavrosからの指示をmission plannerからの指示に見せかけることができる# 追加設定 tgt_system: 1 tgt_component: 1 system_id: 255 component_id: 240 - launchファイル名はmavros.launchとした
- パッケージ名変更にあわせてlaunchファイル内も書き換えた
起動
事前準備
pixhawkとubuntuを接続します。接続した際に、/dev/ttyACM?が追加されていることを確認します。今回はACM0をつかうのですが、違うポートになっている際はlaunchを書き換えてください。なお、この作業は起動したときに毎回行う必要がありますが、めんどくさい時はudevルールを設定してください。※やり方は別記事を参照のこと。
権限の変更
sudo chmod 777 /dev/ttyACM0起動コマンド
roscore別のターミナルを開いて
roslaunch mavros_test mavros.launchモードの変更とアーム。Disarmする際はfalseを送れば良い。
rostopic pub /mavros_bridge/activate std_msgs/Bool true別の方法
最初に作成したc++ソースには、仮GlobalPointを送り、モード変更とArmが自動でできる機能がついている。手動でモードチェンジとarm/disarmすることもできる
Arm/Disarm
rosservice call /mavros/cmd/arming True
rosservice call /mavros/cmd/arming False
または
rosrun mavros mavsafety arm
rosrun mavros mavsafety disarmモードチェンジ
rosservice call /mavros/set_mode "custom_mode: 'GUIDED'"
または
rosrun mavros mavsys mode -c MANUAL
または
rosrun mavros mavsys mode -b <ENUM VALUE>| ENUM Value | カスタムモード |
|---|---|
| 0 | MANUAL |
| 2 | LEARNING |
| 3 | STEERING |
| 4 | HOLD |
| 10 | AUTO |
| 11 | RTL |
| 15 | GUIDED |
| 16 | INITIALISING |
状態の確認
現在の状態を表示
rostopic echo /mavros/stateheader:
seq: 151
stamp:
secs: 1709079027
nsecs: 233683329
frame_id: ''
connected: True
armed: True
guided: True
manual_input: False
mode: "GUIDED"
system_status: 5
---
アームできていない時はarmedがfalseになっている。
アームできない原因はこんな感じで表示される。
今回はpixhawk内のアーム条件を厳しくしてたから、アームできなかった。
一度mission plannerを起動してフルパラメータリストから変更しよう。

GCS(missionplanner)との接続
pixhawkをubuntuにusb接続すると、mission plannnerに挿して動作確認ができない。
対策パターンとしては
- pixhawkに繋いだPCからudpで別のmission plannerの入ったPCに送る
- pixhawkのテレメトリ端子からUART接続する(もしくはテレメトリアンテナ接続)
の方法が使えると思う。
2個目については特に工夫点はいらない。
1個目についてはパラメータのgcs_urlを指定してあげると良いみたい。
launchファイルに追記しよう。
fcuはpixhawkのこと。
fcu_url:=serial:///dev/ttyACM0:57600
gcs_url:=udp://pixhawkに繋いだコンピュータ:14555@missionplanner側のコンピュータ:14550うちの環境ではこんな感じ。VPNに繋いでるので、遠隔でアクセスできる。
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<arg name="fcu_url" default="/dev/ttyACM0:57600" />
<arg name="gcs_url" default="udp://:14555@192.168.30.10:14550" />
<node pkg="mavros" type="mavros_node" name="mavros" clear_params="true" output="screen">
<param name="fcu_url" value="$(arg fcu_url)" />
<param name="gcs_url" value="$(arg gcs_url)" />
<!-- load blacklist, config -->
<rosparam command="load" file="$(find mavros)/launch/apm_pluginlists.yaml" />
<rosparam command="load" file="$(find mavros_test)/config/apm_config.yaml" />
</node>
<node name="mavparam" pkg="mavros_test" type="mavparam.py" output="screen"/>
<node name="mavros_bridge" pkg="mavros_test" type="mavros_bridge" output="screen"/>
</launch>別の方法としてmavlink-routerも使用できる。
※別記事を参照してください。
動作確認
cmd_vel
pixhawkをguidedモードにしている時はcmd_velコマンドでロボットの操作ができるらしい。
が、実際に試したところ動かない。理由はわからないが、GPSが受信できる環境じゃないと動かなかった。
/mavros/setpoint_velocity/cmd_vel
/mavros/setpoint_velocity/cmd_vel_unstampedにgeometry_msgs/Twist型またはgeometry_msgs/TwistStamped型のトピックを5Hz以上で送ってあげると動くらしい。
rc_override
これはrc信号を直接乗っ取る方法でmissionplannerのjoy機能と同等の使い方ができる。
モードはmanualにセットする。
/mavros/rc/overrideにmavros_msgs/OverrideRCIn型のトピック(中身はただの16個のint型配列)を送ってやれば良い。
トピックを送る
なんらかのパッケージをいれるか自分で書けば良いのだが、とりあえず動作確認だけしたいという時はrostopic pubコマンドを使うと良い。
rostopic pub /mavros/setpoint_velocity/cmd_vel geometry_msgs/TwistStamped -r 10 "{header: auto, twist: {linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 2.0}}}"
出力確認
mission plannerのservo outputからみるのがわかりやすいが、下記コマンドでみると手っ取り早い。
rostopic echo /mavros/rc/out参考
https://qiita.com/srs/items/09d217c8b9f9e21d2f1d
https://qiita.com/srs/items/1b14bdf0f1fd3c49cf49
http://wiki.ros.org/mavros/CustomModes
https://docs.ros.org/en/jade/api/mavros_msgs/html/srv/SetMode.html
https://docs.ros.org/en/noetic/api/mavros_msgs/html/srv/CommandBool.html
https://github.com/mavlink/mavros/issues/1596
https://index.ros.org/p/mavros/
https://masoudir.github.io/mavros_tutorial/Chapter1_ArduRover_with_CLI/Step2_How_to_Arm_and_Disarm/
https://masoudir.github.io/mavros_tutorial/Chapter1_ArduRover_with_CLI/Step1_How_to_change_mode/