ラズパイでCANを使いたい
環境
- ラズパイ4B一式
- OS:Ubuntu18またはラズパイOS
- MCP2515基板(Amazonで500円くらいで売ってるやつ)
- ジャンパワイヤ-メスメス
以下はあれば嬉しい
- 16Mhz水晶(あれば)
- はんだごて&はんだ
- ハンダシュッ太郎
参考
https://qiita.com/h-kiyo/items/d8583af13768ad67bcd0
前置き
これまでArduinoボードにSPIからMCP2515を接続して,モーターを駆動していた.
このボードには,他にも色々機能をつけていたので,使用していた.
一方,CANしか使用しない場合,いちいちArduinoのシリアルを通してモータ制御するのはめんどくさいので,ラズパイのSPIに直接繋いじゃおうという話.
接続
| Raspberry-pi | 配線 | MCP2515 |
|---|---|---|
| 02 5V | <-> | VCC 5V電源 |
| 06 GND | <-> | GND |
| 24 GPIO8 | <-> | CS |
| 21 GPIO9 | <-> | SO |
| 19 GPIO10 | <-> | SI |
| 23 GPIO11 | <-> | SCK |
| 22 GPIO25 | <-> | INT |
configの書き換え
ubuntuの場合
sudo nano /boot/firmware/config.txtraspiOSの場合
sudo nano /boot/config.txt書き込み内容
dtparam=spi=on
dtoverlay=mcp2515-can0,oscillator=8000000,interrupt=25interruptはGPIO25だけど繋いだところに合わせれば良い.
oscillatorは水晶の周波数を記述する.
標準では8Mhz水晶がついているが,これだと500kbpsは対応できても1Mbpsの通信が微妙なので,16Mhzの水晶に付け替える.
ハンダシュッ太郎を使用すると簡単に交換できるので,常備しておくことをオススメする.

設定
認識されているかどうか
下記コマンドを使用する.
何か表示されればok.
表示されなければ認識されてない.
sudo modprobe mcp251x
dmesg | grep mcp251xcan立ち上げ(リンクアップ)
500kbpsの場合
sudo ip link set can0 up type can bitrate 5000001Mbpsの場合
sudo ip link set can0 up type can bitrate 1000000正常な場合下記のように表示される.
$ ip link show can0
3: can0: <NOARP,UP,LOWER_UP,ECHO> mtu 16 qdisc pfifo_fast state UP mode DEFAULT group default qlen 10
link/can
下記コマンドでcan0が追加されていればok
ifconfigループバックテスト
can-toolの追加
sudo apt install can-utilsループバックモードで立ち上げ直す.
sudo ip link set can0 down
sudo ip link set can0 type can bitrate 500000 loopback on
sudo ip link set can0 up下記コマンドを入力して待機
candump can0別のターミナルを開いて,下記を入力
cansend can0 123#DEADBEEFcandumpコマンドを実行したターミナルで文字が表示されたら成功.
自動起動
今回はserviceファイルに定義する.
cd /etc/systemd/system
sudo nano can.service[Unit]
Description=Setup CAN interface can0
After=network.target
[Service]
Type=oneshot
ExecStart=/sbin/ip link set can0 up type can bitrate 1000000
ExecStop=/sbin/ip link set can0 down
RemainAfterExit=yes
[Install]
WantedBy=multi-user.targetsudo systemctl enable can.service
sudo systemctl start can.serviceRoboMasterモータM3508P19を接続
HとLを接続するだけ.
複数個使う場合は,終端抵抗をつける場所について考える.
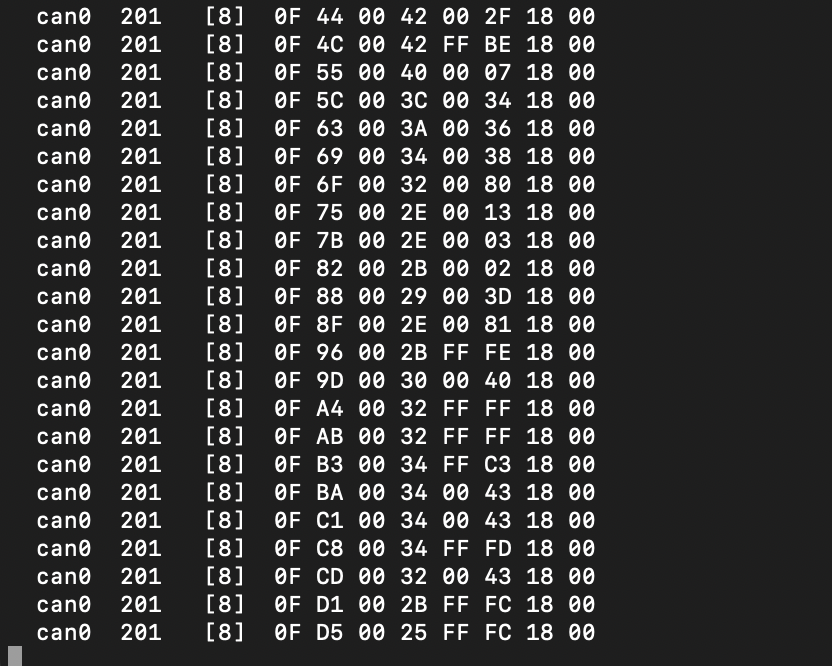
受信データの表示.ID:201が送られてくる.
candump can0
必要パッケージのインストール
環境はひとまずpython2.7
sudo apt install python-pip
pip install --upgrade setuptools wheel
pip install wrapt==1.10.11コード
motor_output_current_A に電流値を入れるとモーターが回る.
なんか,時間が経つと,送信バッファがオーバフローしてエラーが出るので,対策する必要がありあそう.
# -*- coding: utf-8 -*-
import can
import time
import struct
# fmap関数と同様の処理
def fmap(x, in_min, in_max, out_min, out_max):
return int((x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min)
# CANインターフェースを初期化
can_interface = 'can0'
bus = can.interface.Bus(can_interface, bustype='socketcan')
# 初期化変数
tx_id = 0x200
rx_id = 0x201
prev_time = time.time()
while True:
try:
# 送信データ作成
motor_output_current_A = 0.0
motor_output_current_byte = fmap(motor_output_current_A, 0, 20, 0, 16384)
tx_data = [
(motor_output_current_byte >> 8) & 0xFF, # 上位バイト
motor_output_current_byte & 0xFF, # 下位バイト
0x00, 0x00, 0x00, 0x00, 0x00, 0x00 # その他のデータ
]
# 20msごとにデータ送信
if time.time() - prev_time > 0.02:
msg = can.Message(arbitration_id=tx_id, data=tx_data, extended_id=False)
bus.send(msg)
print("Sent:", tx_data)
prev_time = time.time()
# CANデータ受信
rx_msg = bus.recv(timeout=0.01) # 10ms待機
if rx_msg is not None and rx_msg.arbitration_id == rx_id:
# データを解析
rx_data = rx_msg.data
angle = struct.unpack('>h', rx_data[0:2])[0]
rpm = struct.unpack('>h', rx_data[2:4])[0]
amp = struct.unpack('>h', rx_data[4:6])[0]
temp = struct.unpack('b', rx_data[6:7])[0]
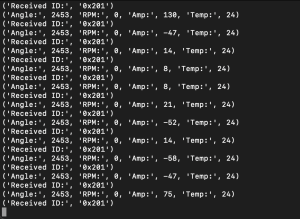
print("Received ID:", hex(rx_msg.arbitration_id))
print("Angle:", angle, "RPM:", rpm, "Amp:", amp, "Temp:", temp)
except KeyboardInterrupt:
print("Stopping...")
break